
Description
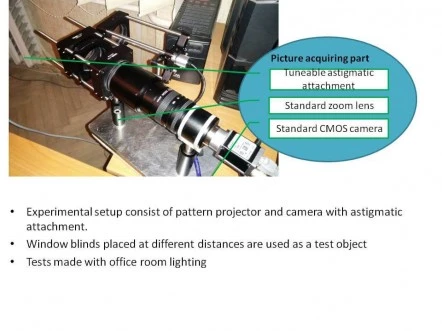
Optics for Hire (OFH) introduces a groundbreaking approach to 3D depth mapping, leveraging our extensive expertise in distance measurement and imaging technologies. Our innovative method, detailed in US Application No. 14/256,085, utilizes a pattern projector combined with an astigmatic lens to create precise depth maps. This cutting-edge technology is a testament to our commitment to advancing the field of robotic vision, where our clients have already achieved global success with millions of units sold.
The core of our technology involves projecting circular spots using a laser with a lenslet array or grating. These spots are then collected by an image sensor through an astigmatic lens, which alters the shape of the point spread function (PSF) based on the object's distance. By decoding the image using sophisticated techniques such as the Hough transform and boundary definition, we can accurately determine distances by analyzing the ratio between the long and short axes of the spots. This unique approach offers significant advantages over traditional methods, particularly in its resilience to multi-path interference and variations in object reflection or ambient light.
Our method belongs to the "Depth from Defocus" class of range-finding techniques, which rely on picture analysis rather than light phase shifts. By introducing astigmatism to the image collecting lens, the eccentricity of the elliptical PSF varies with object distance, allowing for precise depth measurement. This system can be remarkably compact, with enhanced performance when the projection and collection paths are closely aligned. Furthermore, in certain applications, the system can function effectively without a projected pattern, showcasing its versatility and adaptability.
Multipath errors, a common issue in Time-of-Flight (TOF) based rangefinders, are caused by unwanted reflections from angled surfaces. Our solution effectively mitigates these errors, particularly in challenging scenarios where surfaces are positioned at a 90° angle. Through rigorous testing with glossy paper-coated cartons, we have demonstrated the robustness of our method in overcoming these challenges, ensuring accurate and reliable depth mapping in diverse environments.
3D Mapping Technology
Specifications
| Measurement Technique: | Other (not specified) |
|---|---|
| Light Source Type: | Modulated Laser |
| Light Source Wavelength: | 650 nm |
| Sample Reflectivity: | 10 – 90 % |
| Vertical Range: | 10 nm |
| RMS Repeatability: | <0.01 nm |
| RMS Precision: | <0.1nm |
| Magnification: | Other / Not specified |
| Application: | 3D Imaging |
| Software Compatibility: | Other / Not specified |
| Z-axis Sensing Technology: | Not Specified |
Got questions about specs? Use the inquiry form to ask.
Features
- Unique 3D Depth Mapping Technology: Developed by Optics for Hire (OFH), this innovative method utilizes a pattern projector and an astigmatic lens to generate precise 3D depth maps.
- Advanced Image Processing: Circular spots are projected using a laser with a lenslet array or grating, and astigmatic spots are collected at the image sensor. The image is decoded using methods like Hough transform and boundary definition.
- Accurate Distance Measurement: Distance is determined by analyzing the ratio between the long and short axis of the spot, providing reliable measurements.
- Resilient to Interference: The method is not sensitive to multi-path interference, ensuring accurate depth mapping even in complex environments.
- Adaptable to Various Conditions: Less sensitive to changes in object reflection, scattering, or ambient light, as it relies on changes in spot shape rather than intensity.
- Compact System Design: The system can be very small, with improved performance when the projection axis and collection path are positioned closely together.
- Versatile Application: For certain applications, the system can function without a projected pattern, enhancing its versatility.
- Innovative Concept: By adding astigmatism to the image collecting lens, the shape of the point spread function (PSF) varies with the distance to the object, allowing for precise depth measurement.
- Effective Multi-path Error Management: The solution belongs to the "Depth from Defocus" class, minimizing errors common in TOF-based systems, especially in challenging scenarios with surfaces at 90° angles.
Applications
- Robotic Vision: Enables reliable navigation and object detection in complex environments.
- LIDAR Systems: Provides enhanced accuracy and stability for automotive and mapping solutions.
- Computational Photography: Improves depth accuracy in imaging and augmented reality devices.
- 3D Mapping & Sensing: Suitable for industrial, scientific, and consumer electronics requiring high-fidelity depth data.
- Distance Measurement Instruments: Supports precision rangefinding with reduced interference sensitivity.
Frequently Asked Questions
What is the unique method developed by OFH for 3D depth mapping?
How does the OFH method determine distance?
What are the key benefits of the OFH depth mapping method?
Why is the OFH method less sensitive to ambient light changes?
What is the concept behind using an astigmatic lens in this method?
How does the OFH method address multi-path error?
Can the OFH system be used without a projected pattern?
Got more questions? Use the RFQ form to ask the supplier directly.
Similar Products


Need pricing for this product? Send a quick inquiry
Your inquiry has been received.
Create an account by adding a password
Why create an account?
- Auto-complete inquiry forms
- View and manage all your past messages
- Save products to your favorites
- Close your account anytime — no hassle