In recent medical research fields, continuum robot is becoming a prevalent topic because it can traverse confined spaces and manipulate objects in complex environments due to its compliant structure. With the emergence of continuum robot, photonic sensors are widely employed to be inserted through working channels within the robot due to their properties of bio-compatibility. Those sensors are utilized for shape reconstruction to determine robot’s positional and directional information. A survey about recent development in techniques for 3D shape sensing was investigated by Shi et al. [1] Specific topics on shape reconstruction methods, including fiber-optic-sensor-based, electromagnetic-tracking-based, and intraoperative imaging modality-based were discussed.
Fiber-Optic-Sensor-Based Shape Reconstruction
Fiber optic sensors are small, highly elastic and flexible, so they are suitable and inherently safe for most medical applications. Basically, the fiber optic sensors can be divided into three categories: light intensity modulation (LIM)-based, interferometer-based, and Fiber Bragg Grating (FBG)-element-based.
LIM-based sensors measure the light intensity reflection by an optical mirror, light coupling, or a macrobending fiber configuration. However, such techniques would give out undesired outcome due to the change in light intensity input or unwanted fiber losses that come from the continuum robot’s twist or squeeze. Interferometer-based sensors involve the use of multiple reflective mirrors to generate fringes and they are capable of measuring the parameters that change the distance between mirrors induced by the movement of continuum robot, but they cannot obtain multi-point strain measurements in axial direction along the robot.
Although those two techniques have drawbacks, they are still popular in the industry because they are cheap and temperature independent. In contrast, FBG sensors can provide reliable results even when light intensity input changes. FBG sensors yield better resolution, however, they are more expensive. To obtain the distributed measurement along the continuum robots, multiple FBG sensors are required, to construct an optical spectrum interrogator for force and curvature sensing, which costs a lot.
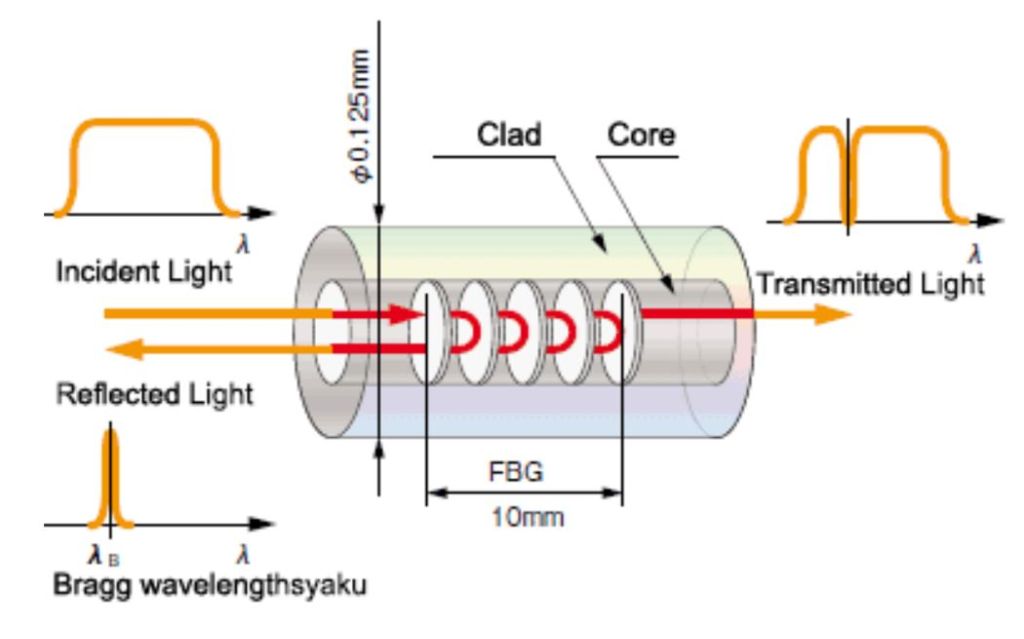
The figure shows part of FBG optical fiber cable. The change in mechanical strain applied to FBG optical fiber makes a change in the wavelength of the reflected light. Courtesy of Tokyo Measuring Instruments Lab
Electromagnetic Tracking Based Shape Reconstruction
Electromagnetic (EM) tracking is the method that enables localization of small EM sensors in a given EM field with the working principle of mutual induction. Having the advantage of miniature size, EM technology has been applied in continuum robots for continuous and real time localization and tracking. After capturing discrete position information from distributed EM sensors within the robot, researchers integrate the EM tracking approach with robotic kinematic model to get accurate shape sensing.
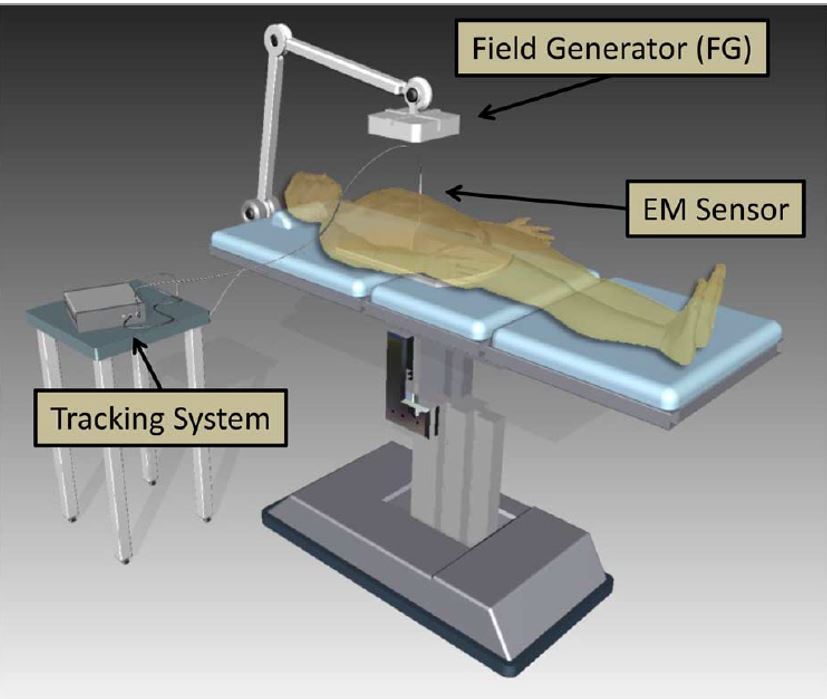
Principle of Intra-operative EM Tracking. Courtesy of Franx et al. [2]
Intraoperative Imaging Based Shape Reconstruction
Intraoperative imaging based shape reconstruction is also referred to as vision-based shape reconstruction. This technique can present direct and accurate measurements for shape reconstruction of continuum robots. In minimally invasive surgery, standard intraoperative imaging modalities, such as endoscopy, fluoroscopy, and ultrasound, are commonly used to detect the location of surgical continuum robots.
Biplane fluoroscopic imaging systems can continuously provide two simultaneous views to determine the center line and approximate the features of the robots, based on the triangulation principle. Multiple modeling algorithms were investigated by researchers to get more optimized estimation for shape. Using this imaging method allows the surgeon to complete the procedure with small incision. This ensures less surgical trauma and less blood loss for the patients. However, the concerning issue of this modality is the extensive exposure to radiation due to long computational time for the shape reconstruction.
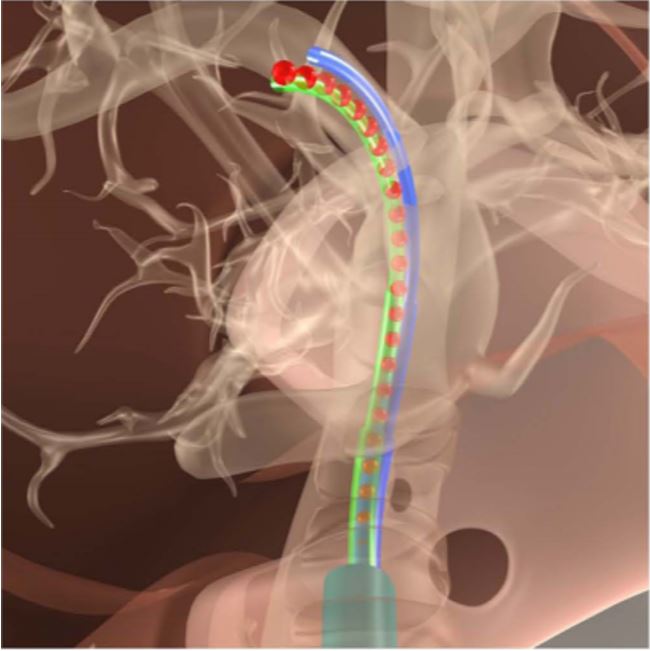
Tube Robot deployed via a bronchoscope in human lung. The figure shows the concentric tube robot shape (green), the kinematic model (blue), and 3D reconstructed shape (red) for next time step. [3]
Ultrasound imaging-based shape reconstruction supports consistent depth information of continuum robot in real time. Recent progress includes tracking tissue deformation, tip position, and reducing imaging artifacts on shape estimation. However, this technique is still facing the challenge of low resolution and low accuracy. Therefore, ultrasound imaging becomes a complementary technique that is fused with other imaging modalities to obtain better clinical outcomes.
Conclusion
Shape sensing is significant in path planning, human-robot interaction, and system control for continuum robots. The shape reconstruction methods addressed above have different strengths and drawbacks. High demand on continuum robots’ sensing system is a major challenge. The future of the continuum robot is promising when sensing techniques are well developed. More research will be done on the shape reconstruction techniques for more accurate and straightforward outcomes until they are extensively accessible in clinical usage.
Reference
[1] C. Shi et al., “Shape Sensing Techniques for Continuum Robots in Minimally Invasive Surgery: A Survey,” in IEEE Transactions on Biomedical Engineering, vol. 64, no. 8, pp. 1665-1678, Aug. 2017.
[2] A. M. Franz et al., “Electromagnetic tracking in medicine—A review of technology, validation, and applications,” IEEE Trans. Med. Imag., vol. 33, no. 8, pp. 1702–1725, Aug. 2014.
[3] E. J. Lobaton et al., “Continuous shape estimation of continuum robots using X-ray images,” in Proc. IEEE Int. Conf. Robot. Autom., 2013, pp. 725–732.